Den Dreh raus: Drehgebersimulation
Erweiterung eines HIL-Prüfstandes zum Test einer SIL 3 Drive Safety Option um eine Simulation sicherheitsgerichteter Drehgebertypen. Der HIL-Prüfstand wird durch ein umfangreiches Testframework gesteuert, in das sich das Simulationssystem integrieren muss.
Ausgangssituation:
Der verwendete HIL-Prüfstand stimuliert den Prüfling an den Gebereingängen bisher ausschließlich mit analogen SIN / COS Gebersignalen zur Weg- und Streckenabbildung. Eine Simulation weiterer, auch digitaler am Markt erhältlicher Gebertypen, die diversitär/redundant den Prüfling stimulieren können, lag nicht vor.
Unser Auftrag:
Entwicklung einer Drehgebersimulation, so dass diese simultan und synchron bis zu 16 Geber verschiedenster Typen auf den Prüfling abfahren kann. Dabei muss sich die Simulation nahtlos in das mit C# betriebene Testframework einpassen, dessen Vorgehen sowie den Schnittstellenaufbau übernehmen.
Unser Umsetzung:
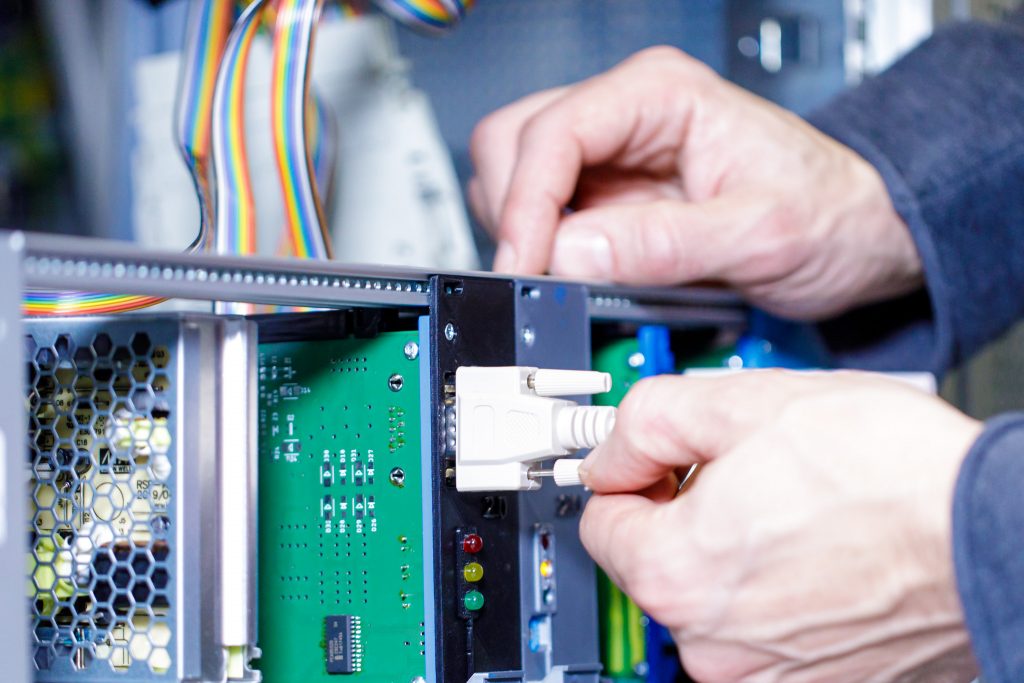
Das System wurde von uns modular und jederzeit erweiterbar aufgebaut. Mechanisch kommt dabei ein konventionelles 19″ Rack mit 4 HE zum Einsatz. Das Rack-Gehäuse beinhaltet eine Backplaneplatine und Netzteile für verschiedene Versorgungsbereiche wobei der Anschluss des Racks über einen Harting-Stecker für die Datenverbindung sowie ein Kaltgerätekabel zur Spannungsversorgung realisiert wird.
Zum Einschub gibt es zwei unterschiedliche Kartentypen, die über die Backplane untereinander mit dem HIL-System kommunizieren können, die Spannungsversorgung jeder Karte erfolgt ebenfalls über die Backplane.
In ihrer Rechnerarchitektur unterscheiden sich die Kartentypen, so kommt in der einen Version eine µC basierte Architektur auf Basis eines STM32 zum Einsatz, in der anderen eine Xilinx basierte FPGA-Architektur.
Jede Einschubkarte kann dabei unterschiedliche Instanzen und Funktionen annehmen. Welche genau, wird über die verwendete Firmware der Karte bestimmt.
- Main-Modul: Kommunikation mit dem Prüf-PC, Koordination und Taktgeber für anderen gesteckten Gebermodule
- Geber-Modul: Simulation eines spezifischen Gebers mit Ausgabe des Gebersignals an den Prüfling
- IO-Modul: Signal-Level ändern, Ausgänge schalten
Folgende Gebertypen sind derzeit mit dem System simulierbar:
- SIN/COS
- HTL
- PXV
- HIPERFACE DSL
- SSI, so wie Dual-SSI
Wie es funktioniert:
Das System kann einfach und zügig um neue Komponenten und Gebertypen/Protokolle erweitert werden. Für die Durchführung eines Tests steuert das Testframework des HIL-Prüfstands die Simulationshardware über einen CAN-Bus an und überträgt die zu simulierenden Strecken und Fahrdaten. Das Main-Modul verteilt die Daten an die gesteckten Geber-Module und wartet auf deren Fertigmeldung. Liegt diese vor, ist die Simulation fahrbereit und erwartet das Startsignal aus dem Testframework des HIL-Prüfstandes. Liegt dieses ebenfalls vor, gibt das Main-Modul das Startsignal an die Geberkarten weiter und liefert fortan einen gemeinsamen Takt für die Karten. Dies ermöglicht, eine variable Anzahl von Gebertypen/Protokollen zeitgleich und synchron mit dem gleichen Streckenprofil auf den Prüfling abzufahren.
Die Gebersignale werden mit einer Sample-Frequenz von 5 MHz erzeugt, jede 50us (Frame Point) kann eine Signaländerung oder eine Fehlereinpflanzung stattfinden. So lassen sich beispielsweise spezifische Verfahrprofile programmieren oder Geberfehler wie Amplitudensprung, fehlende Botschaften und korrupte Nachrichten provozieren. Die konfigurierten Geber arbeiten absolut zeitsynchron zueinander. Die Gebersignale haben eine Auflösung von bis zu 64 Bit Single- und 64 Bit Multiturn.
Eingesetzte Technologien: C, C#, VHLD, CAN, STM32 Mikrocontroller, Xilinx FPGA, Sin-Cos-Encoder, HTL-Encoder, Hiperface, SSI, PXV